اسکلتهای خارجی با ارائه پشتیبانی فیزیکی، تقویت قدرت یا کمک به حرکات دشوار، کارایی دارند اما تاکنون، اکثر این ابزارها به دلیل تکیه بر حرکات از پیش برنامهریزی شده، محدود بودهاند. کاربر باید این حرکات را «فراخوانی» کند که استفاده از آنها را در موقعیتهای غیرقابل پیشبینی زندگی روزمره دشوار میکند.
گروه پژوهشی پروژه ربات «ریکن» (RIKEN) ژاپن، با وارد کردن هوش مصنوعی به این فناوری، راهی برای غلبه بر این محدودیت پیدا کرده است. نتایج پژوهش آنان نشان داد که چگونه هوش مصنوعی میتواند اسکلتهای خارجی را انعطافپذیرتر، کارآمدتر و کاربرپسندتر کند.
بهطور سنتی، اسکلتهای خارجی با استفاده از حسگرهای قرار داده شده روی عضلات، قصد فرد برای حرکت را تشخیص میدهند. این روش که الکترومیوگرافی (EMG) نام دارد، سیگنالهای الکتریکی که هنگام آماده شدن عضلات برای حرکت ایجاد میشوند را اندازهگیری میکند. الکترومیوگرافی اگرچه موثر است، اما نیاز به قرارگیری و درجهبندی دقیق حسگرها دارد که زمان میبرد و باعث میشود سیستم در خارج از آزمایشگاه کاربردی نباشد.
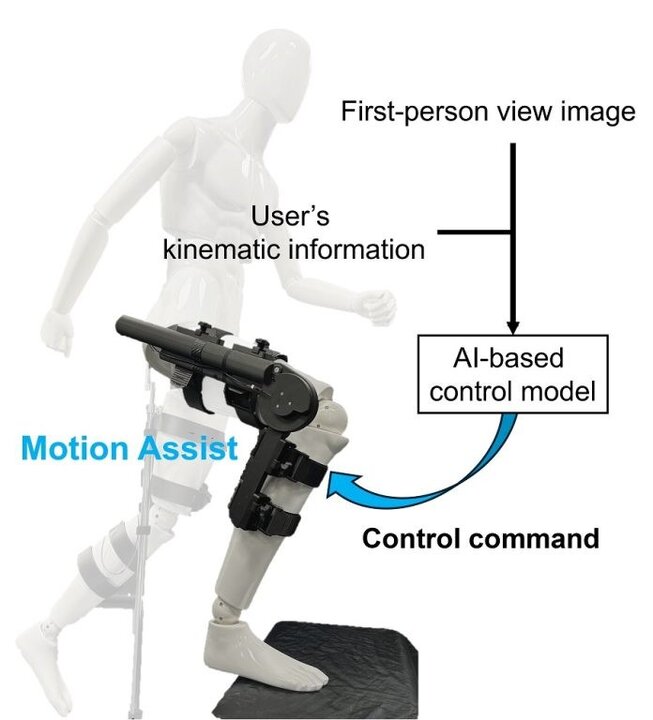
گروه «ریکن» به دنبال راهحل سادهتر و هوشمندانهتر بود. آنان سیستمی را توسعه دادند که یک حسگر بصری را با هوش مصنوعی ترکیب میکند. دوربین کوچک که در نزدیکی چشمان کاربر قرار میگیرد، محیط را از دیدگاه کاربر ثبت میکند.
در عین حال، حسگرهای روی زانوها و تنه، دادههایی در مورد حرکت بدن ارائه میدهند. یک مدل هوش مصنوعی مبتنی بر ترانسفورماتور، این اطلاعات را پردازش میکند تا تصمیم بگیرد که چگونه به بهترین نحو کمک کند.
پژوهشگران این سیستم را با کارهای روزمره، مانند برداشتن شی و بالا رفتن از پله آزمایش کردند. این فعالیتها شامل انواع مختلفی از پشتیبانی فیزیکی هستند و آنها را به آزمون خوبی برای سازگاری اسکلت خارجی تبدیل میکنند.
نتایج پژوهش کنونی دلگرمکننده بود؛ کاربران هنگام پوشیدن اسکلت خارجی مجهز به هوش مصنوعی، فعالیت عضلانی کمتری نشان دادند، به این معنی که دستگاه بهطور موثر بار کاری را با بدن آنان تقسیم میکرد. یکی از هیجانانگیزترین یافتهها این بود که استراتژی کمکی آموختهشده از دادههای یک کاربر، میتواند برای شخص دیگری نیز اعمال شود.
این سازگاری بین کاربران چیزی است که بسیاری از سیستمهای اسکلت خارجی با آن دست و پنجه نرم میکنند و اغلب نیاز به آموزش مجدد یا کالیبراسیون مجدد برای هر فرد دارند. رویکرد گروه پژوهش «ریکن» مسیری را به سوی اسکلتهای خارجی نشان میدهد که میتوانند به سرعت و بدون تنظیمات گسترده با کاربران مختلف سازگار شوند.
جون موریموتو، یکی از پژوهشگران این پژوهش گفت: نتایج کنونی، گامی مهم به سوی اسکلتهای خارجی هوشمند است که میتوانند طیف وسیعی از فعالیتهای انسانی را در محیطهای متنوع پشتیبانی کنند.
همکار وی، جون-ایچیرو فوروکاوا افزود: چنین فناوری میتواند در مراقبتهای بهداشتی، توانبخشی و مراقبت از سالمندان متحولکننده باشد زیرا به افراد دارای آسیب یا اختلالات حرکتی کمک میکند تا استقلال خود را بازیابند و کیفیت زندگی خود را بهبود ببخشند.
سایت ساینس گزارش کرد، با اصلاحات بیشتر، اسکلتهای خارجی مبتنی بر هوش مصنوعی میتوانند فراتر از آزمایشگاه و به دنیای واقعی حرکت کنند و کمکهای شخصیسازیشده و تطبیقی را به روشهایی ارائه دهند که طرحهای قبلی نمیتوانستند. چشمانداز رباتهای پوشیدنی ممکن است به زودی به چیزی تبدیل شود که دستگاه نه فقط از کاربر بیاموزد، بلکه با آنان یاد بگیرد.
نتایج تحقیق کنونی در نشریه «رباتیک انپیجی» (npj Robotics) منتشر شده است.
انتهای پیام