

به گزارش ایسنا، این پروژه متعلق به گروه «هوش مصنوعی و مکانیکی» در موسسه فناوری ایتالیا (Istituto Italiano di Tecnologia) است. آنها ربات دوپای کودکمانند iCub را که در اصل برای تحقیقات هوش مصنوعی طراحی شده بود، انتخاب کردند و تلاش کردهاند آن را با نیروی جت به پرواز درآورند.
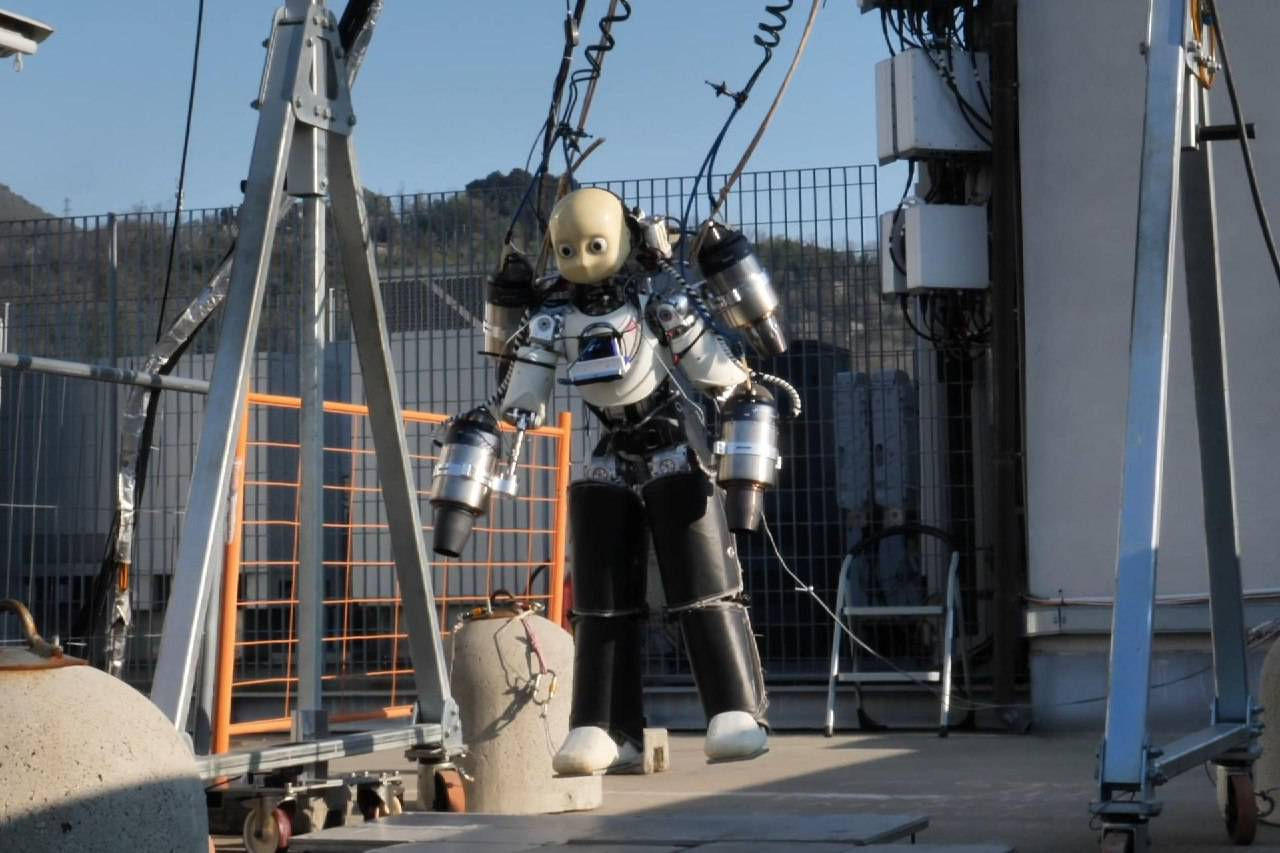
به نقل از آیای، برای این کار، علاوه بر نصب یک جتپک دوگانه روی پشت ربات، گروه تحقیقاتی مجبور شدند دستهای انسانمانند انعطافپذیر نسخهی اولیه را فدای موتورهای آتشزای JetCat کنند. نیروی پیشران تولیدشده توسط این موتورها تا ۱۰۰۰ نیوتن میرسد و دمای گازهای خروجی آنها میتواند تا ۸۰۰ درجه سانتیگراد بالا رود.
به گفته مهندسان سازنده ربات iRonCub۳، این گامی بزرگ نسبت به نسخههای قبلی پروژه iRonCub محسوب میشود. نسخههای قبلی برای آزمایش مجزای اجزایی مانند طراحی جتپک، الگوریتمهای تخمین یا یادگیری آیرودینامیک استفاده میشدند، اما iRonCub۳ نخستین سیستم کاملی است که تمامی این مؤلفهها را در یک ربات پرندهی انساننما ادغام کرده است.
این ربات که از شخصیت تونی استارک (مرد آهنی) الهام گرفته شده، دارای یک ستون فقرات تیتانیومی جدید است تا بتواند نیروهای وارده هنگام پرواز را تحمل کند. همچنین به جای پوششهای رنگارنگ نمونههای اولیه، پوششهایی مقاوم در برابر حرارت برای آن طراحی شدهاند. مدارهای الکترونیکی جدید، حسگرهای نیرو-گشتاور در جتپک، و اجزای غیرضروری قبلی حذف شدهاند تا سیستم بهروزتر و سبکتری ایجاد شود.
بازوهای این ربات بهکمک تحلیل المان محدود (FEM) طوری طراحی شدهاند که بتوانند با پویاییهای واقعی پرواز تطابق داشته باشند. از سوی دیگر، سامانهی کنترلی پیشرفتهی چندنرخهای نیز برای آن طراحی شده است که از کنترل پیشبینیکنندهی مدلمحور استفاده میکند که متناسب با ویژگیهای غیرخطی و چندفرکانسی عملکرد جتها و مفاصل است.
تا ماه اوت سال گذشته، نمونهی اولیه iRonCub۳ در تونل باد مورد آزمایش قرار گرفته بود تا شبیهسازیهای آیرودینامیکی تایید شوند. در آن زمان، تمام موتورهای جت با موفقیت چندین بار روشن شده بودند. تیم پروژه از آن زمان یک مدل کنترل پیشرفته برای سیستمهای مرکب از اجزای بههمپیوسته توسعه داده و مدلهایی مبتنی بر هوش مصنوعی برای تخمین در لحظه نیروهای آیرودینامیکی طراحی کرده است.
در ویدیویی که منتشر شده، نمونه ۷۰ کیلوگرمی این ربات با احتساب وزن موتورهای جت موفق به برخاستن پایدار و شناور ماندن نسبتا پایدار شده است اگرچه که مدت زمان پرواز در هر آزمایش کوتاه بوده است.
کنترل پرواز این ربات بهدلیل اشکال گوناگون بدنه و بازوهای متحرک، کار سادهای نیست و پیچیدگی زیادی دارد. آنتونلو پائولینو، نویسنده اصلی مقالهی مربوط به این پروژه، گفت: مدلهای ما شامل شبکههای عصبی آموزشدیده با دادههای شبیهسازیشده و تجربی است که در سامانه کنترلی ربات ادغام شدهاند تا پروازی پایدار تضمین شود.
گروه پژوهشی معتقد است که این ترکیب، به ربات امکان میدهد حتی در مانورهای ناپایدار (مانند روشنکردن پیدرپی موتور یا تغییر شکل بدنه) نیز تعادل و پایداری خود را حفظ کند.
تاکنون این آزمایشها تنها در فضای محدودی در محوطه مؤسسه فناوری ایتالیا انجام شده، اما با پیشرفت کار، پروژه به فضای بزرگتری برای آزمایش نیاز دارد که این فضا از طریق همکاری با فرودگاه جنوا فراهم شده است.
هدف نهایی از توسعه iRonCub۳ استفاده از آن در عملیاتهایی مانند امداد و نجات، بازرسی مناطق خطرناک یا صعبالعبور، و مأموریتهای اکتشافی است.
سرپرست پروژه، دانیله پوچی، توضیح داد: این پژوهش کاملا متفاوت از رباتیک انساننمای سنتی است و ما را وادار به جهشی اساسی نسبت به وضعیت فعلی فناوری میکند.
در اینجا، ترمودینامیک نقش کلیدی دارد. گازهای خروجی از توربینها به دمای ۷۰۰ درجه میرسند و با سرعتی نزدیک به سرعت صوت جریان مییابند. آیرودینامیک باید در لحظه محاسبه شود و سیستمهای کنترلی باید همزمان با عملگرهای آهسته مفاصل و توربینهای سریع جت کار کنند. آزمایش این رباتها همانقدر که جذاب است، خطرناک است و جایی برای آزمون و خطا وجود ندارد.
هدف نهایی این است که رباتهای انساننمایی که ساخته میشوند بتوانند به محل حادثه یا فاجعه پرواز کنند، اطلاعات ضروری را به تیمهای انسانی ارسال کرده، روی زمین فرود آیند، از موانع عبور کنند، پلهها را بالا بروند، درها را باز کنند و وظایف پیچیدهتری را نیز انجام دهند. این قابلیتها میتوانند برای بازرسی ساختمانها یا زیرساختهای خطرناک بسیار مفید باشند.
انتهای پیام


نظرات