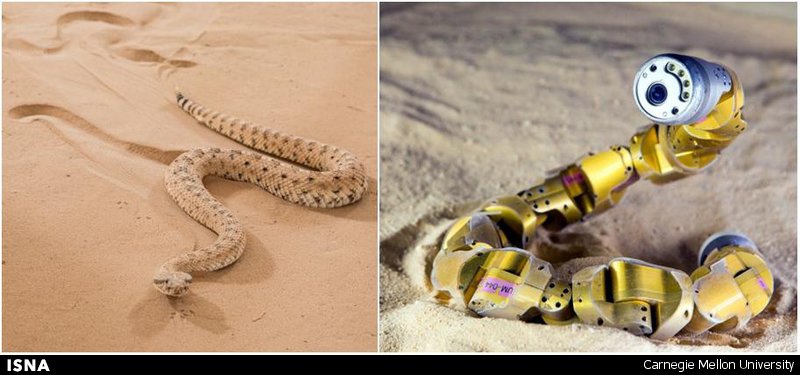
«حمید مروی» با همکاری گروهی از محققان رباتیک دانشگاه کارنگی ملون، مار رباتیکی طراحی کردهاند که با تقلید حرکات مار زنگی، از قابلیت بالا رفتن از روی تپههای شنی برخوردار است.
به گزارش سرویس فناوری خبرگزاری دانشجویان ایران (ایسنا)، در هنگام جستجوی قربانیان در محل حادثه یا انجام مطالعات علمی در سیارات دیگر، توانایی بالا رفتن و حرکت بر روی تپههای شنی یک مزیت مهم برای ربات محسوب میشود.
محققان بخش رباتیک دانشگاه کارنگی ملون با تجزیه و تحلیل دقیق حرکات نوعی مار زنگی (sidewinder)، مار رباتیکی طراحی کردهاند که از قابلیت بالا رفتن از تپههای شنی برخوردار است.
مارها از ویژگی منحصربفرد توانایی حرکت در طیف گستردهای از زمینهای ناهموار برخوردار هستند و میتوانند با توجه به وضعیت فیزیکی محیط، شرایط بدن و الگوی حرکت خود را تغییر دهند.
در این بررسی از دوربینهای تصویربرداری پر سرعت برای درک بهتر حرکات مار زنگی در هنگام بالا رفتن از تپههای شنی استفاده شد.
محققان دریافتند، از طریق افزایش طول قسمتهایی از بدن که در تماس با سطح دانهای شن و ماسه هستند، این حرکات موجدار منحصربفرد در بدن مار ایجاد میشود.
به گفته «حمید مروی»، از دانشآموختگان دانشگاه صنعتی شریف و یکی از اعضای تیم طراحی مار رباتیک، نتایج این مشاهدات بر روی مار رباتیک نیز اعمال و با برنامهریزی مار رباتیک برای حرکت موجدار مانند مار زنگی، ربات قادر به صعود از تپه شنی با زاویه 20 درجه شد.
طول مار رباتیک، 94 و قطر آن پنج سانتیمتر است که از 16 مفصل آلومینیومی تشکیل شده و دارای موتور، حسگرهای مختلف، رایانه و قطعات الکترونیک است که میتواند در آینده برای اکتشافات در سیارات دیگر نیز مورد استفاده قرار گیرد.
الگوبرداری از حرکات مار زنگی برای طراحی مار رباتیک، نمونه بارز استفاده از زیستشناسی در ارتقای فناوری محسوب میشود.
نتایج این دستاورد در مجله Science منتشر شد.
انتهای پیام